PI5 AUTOPILOT
PX4 Autopilot with Compute Module 5
Raspberry Pi Compute Module 5–based autopilot combining reliable flight control and flexible onboard computing for autonomous platforms.
Product Description
FMU CM5 Autopilot is a compact autopilot platform that combines real-time flight control with the flexibility of Raspberry Pi 5 computing. It is designed to support advanced autonomy applications while maintaining stable and deterministic control behavior.
The platform enables developers and system integrators to run high-level applications alongside flight control logic, making it suitable for prototyping, testing, and deployment of autonomous aerial systems. Its architecture bridges low-level control and high-level computing within a single integrated solution.
Product Features
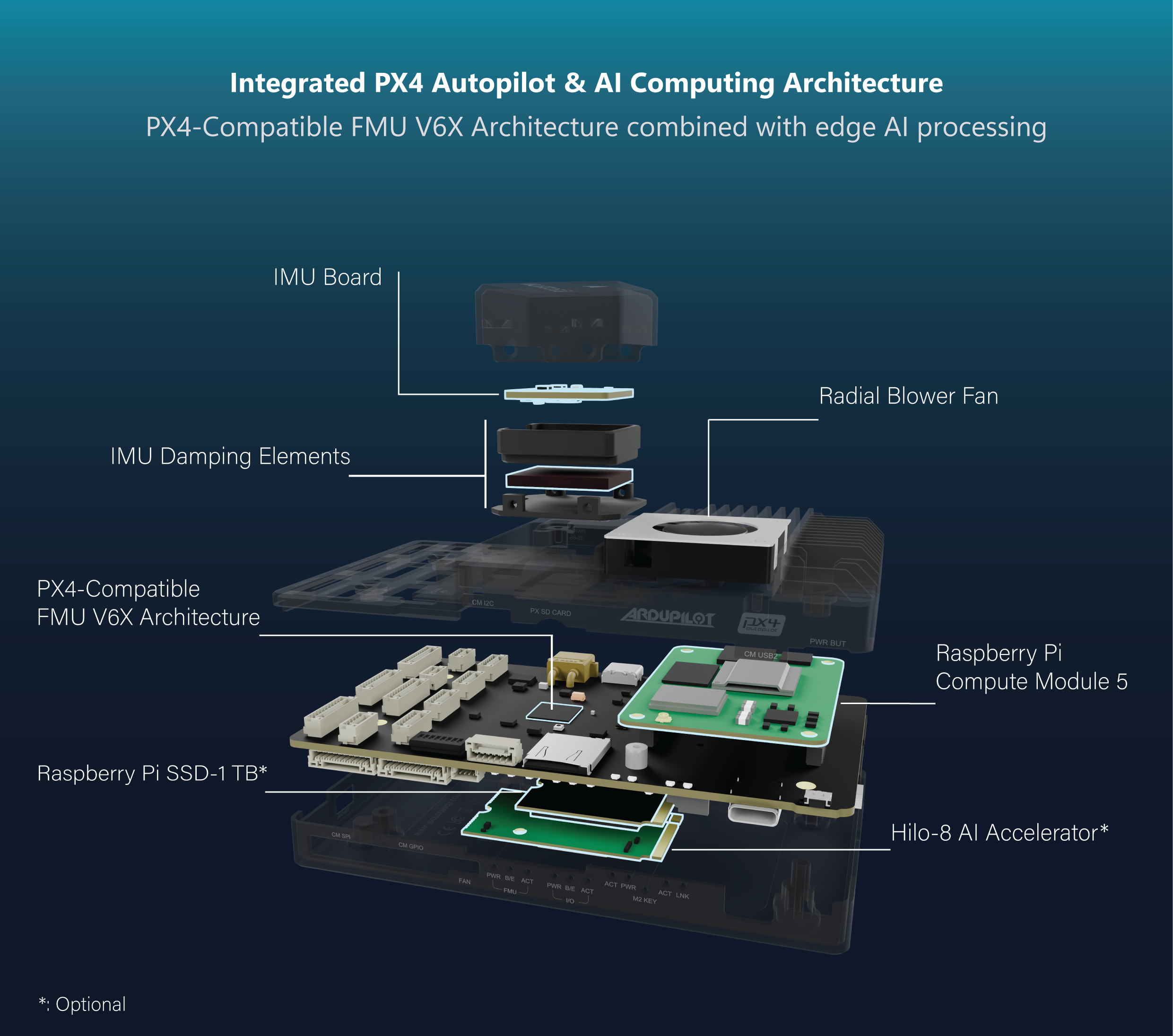
PX4-Compatible FMU V6X Architecture
Industry-proven PX4 flight control with deterministic real-time I/O, fully compliant with FMU V6X standards.
Edge AI Computing – Hailo-8 AI Acceleration
Optional Hailo-8 (26 TOPS) AI accelerator integrated with Raspberry Pi Compute Module 5 enables onboard perception, real-time vision processing, and mission-level autonomy.
Separated Control & AI Domains
Flight-critical control loops remain isolated from AI workloads for maximum system safety and reliability.
Compact & Modular System Design
Highly integrated architecture optimized for size, weight, and power (SWaP-constrained) platforms.
High-Speed Storage & I/O Expansion
Optional high-capacity SSD storage support, combined with multiple high-bandwidth I/O interfaces, enables fast data logging, sensor fusion, and peripheral expansion.
Open & Extensible Software Ecosystem
Linux-based computing combined with PX4 enables rapid development, customization, and integration.
Technical Features
| Power Input | 7V – 28V (3S-6S LiPo), XT30 Connector |
| Overcurrent Protection | 5A Maximum |
| Power Monitor | Internal Voltage & external I2C Current Monitor |
| FMU Processor | STM32H753IIK6TR (32-bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM) |
| IO Processor | STM32F103 (32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM) |
| FMU Status LEDs | 3x LEDs (Red, Green, Blue) |
| FMU Status LEDs | 2x LEDs (Blue, Amber) |
| FMU/IO Debug Interface | SWD (10-pin JST-SH) |
| PWM Outputs | 8 Channels FMU + 8 Channels IO (10-pin JST-GH) |
| RC Input | PPM, S.BUS, DSM (5-pin JST-GH) |
| FMU Onboard Sensors | IMU: ICM-42670-P (SPI) | Barometer: BMP390 (SPI) | FRAM: FM25V02A | EEPROM: AT24C02D |
| Sensor Board | IMU1: BMI270 (SPI) | IMU2: ICM-42670-P (SPI) | Barometer:BMP390 (SPI) | Magnetometer: BMM350 (I2C) | EEPROM: 24LC64T |
| FMU GPS1 | 10-pin JST-GH (UART1, I2C1, 5V Out) |
| FMU GPS2 | 6-pin JST-GH (UART8, I2C2, 5V Out) |
| FMU TELEM1 & TELEM2 | 6-pin JST-GH |
| FMU UART/I2C | 6-pin JST-GH (UART4 and I2C3) |
| FMU I2C | 4-pin JST-GH (I2C2) |
| FMU External SPI | 11-pin JST-GH (SPI6, 2x CS, 2x DRDY, RESET) |
| CAN Bus( FMU & CM5) | 4-pin JST-GH |
| FMU USB | USB Type-C 5V VBUS sense |
| FMU SD Card | MicroSD SDMMC interface |
| FMU Ethnernet | 4-pin JST-GH (LAN8742AI PHY) |
| CM5 USB 3.0 Host | 2x USB Type-C |
| USB 2.0 Host | 1x Micro USB |
| CM5 HDMI Output | Mini HDMI |
| CM5 CSI Camera | 2x 22-pin FFC |
| CM5 PCIe | M.2 Key-M 2230 & 2242 slot (PCIe Gen2 x1) |
| CM5 IMU | BMI270 (SPI) |
| CM5 IO Interface | 6-pin JST-GH(I2C1-I2C3) | UART2 | SPI1 | 4 Channels PWM | Accessiable GPIO22-27 |
| FMU ↔ CM5 Communication | FMU USART2 (TELEM3) ↔ UART3 (CM5) |